


24년 핸즈크래프트 1등 수상!
프로젝트 소개
장애인을 포함하여, 쇼핑 카트를 이용하기 어려운 사람들을 위해
사용자를 추적하는 자율주행 쇼핑카트 ABCart를 개발하였습니다.

프로젝트 배경
편리함을 내세운 온라인 쇼핑 시장이 커지고 있으나, 즐거움과 체험 가능성 등 오프라인 쇼핑의 강점은 여전히 대체 불가능합니다. 그러나 휠체어를 탄 장애인은 쇼핑 카트를 끌기 어렵기에 오프라인 쇼핑에서 소외되어 있습니다. 이를 위해 개발된 장애인 쇼핑카트 또한 한계점이 존재하여, 이를 해결하고자 하였습니다.
목표
•
사용자가 팔을 뻗어 편리하게 상품을 담을 수 있는 거리인 0.5m 를 유지
•
사용자의 좌∙우 움직임을 파악하여 쇼핑카트의 좌 ∙ 우회전을 구현
연구 내용
RSSI 신호세기 값 기반 거리 측정의 오차 줄이기
비상 정지 구현
DC 모터 및 서보 모터 제어
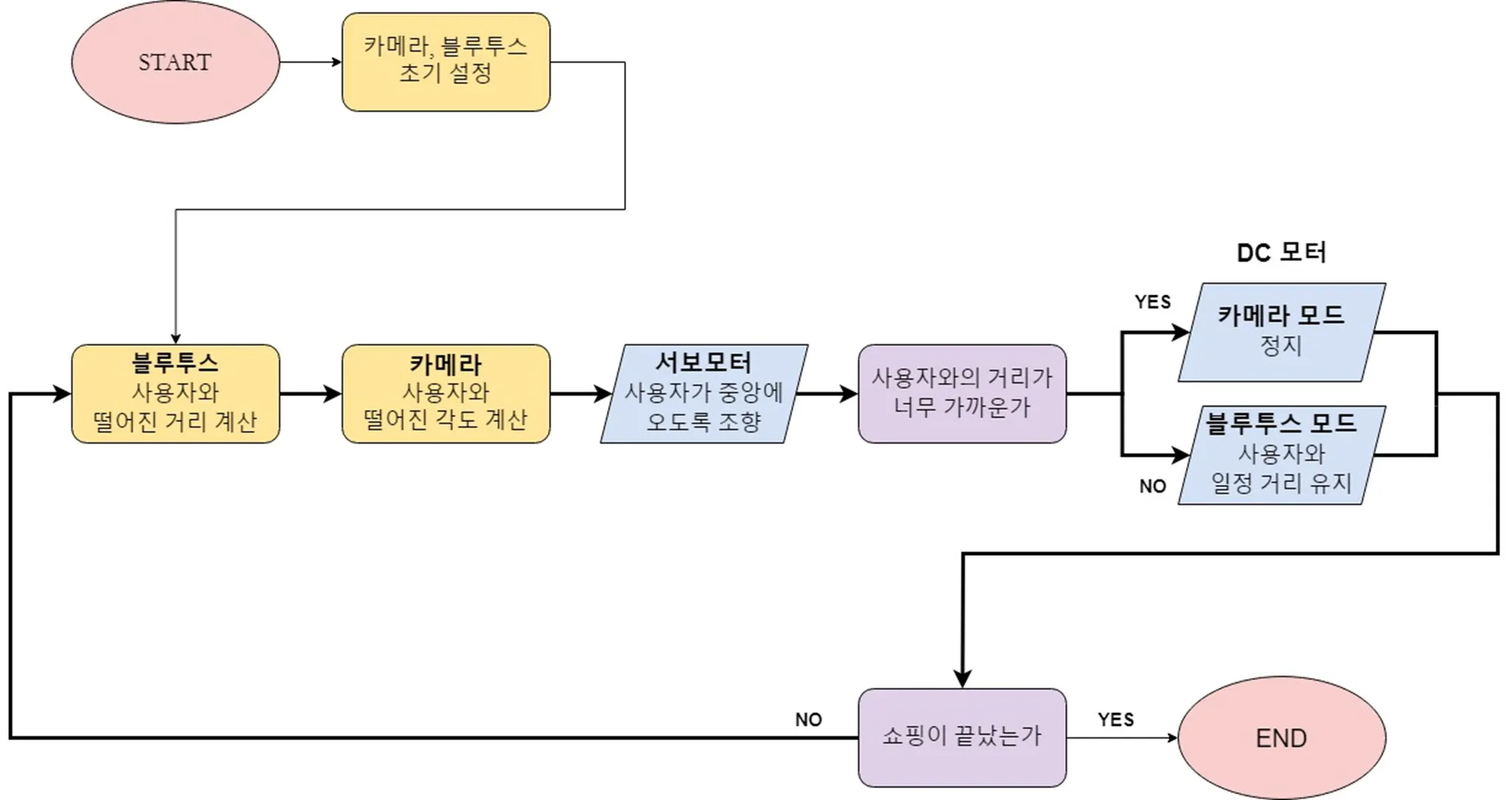
Flowchart
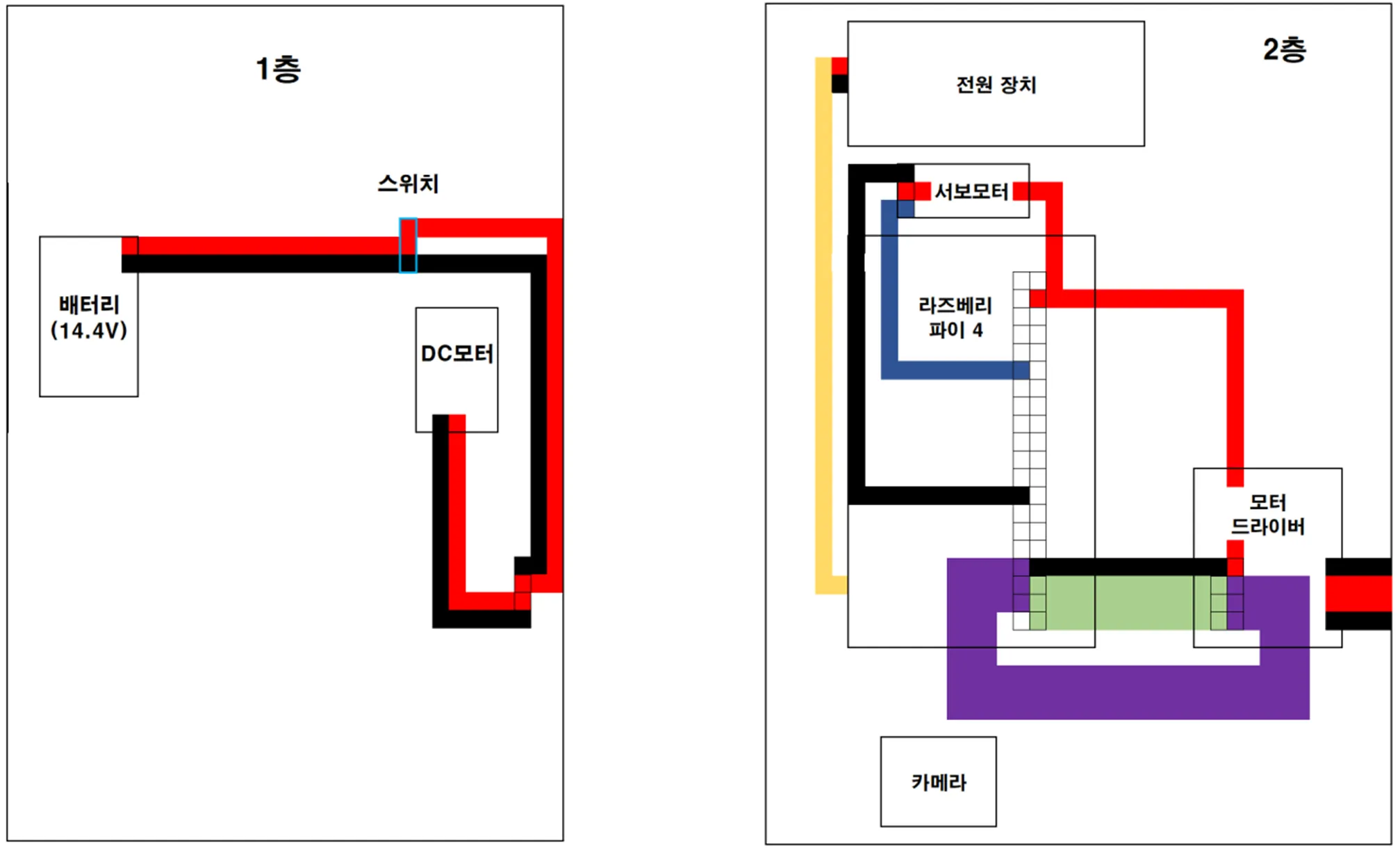
회로도
결과
(프로젝트 결과 화면, 시연 영상 등을 넣어주세요)
결론
본 연구에서는 직접 끌 필요 없이 사용자의 주변에 일정 거리를 유지하며 이동하는 쇼핑 카트를 제작하였습니다. 사용자와 0.5m 거리를 유지하며 전진, 후진, 좌회전, 우회전을 할 수 있도록 구현하였습니다. 이는 고정 및 이동이 불편한 장애인용 쇼핑 카트 사용의 어려움을 해결할 수 있습니다. 또한 유모차를 끌며 쇼핑을 해야 하는 부모나 키가 작은 아이 등 일반적인 오프라인 쇼핑의 질을 향상시킬 수 있을 것으로 기대합니다.
연구 방법 및 과정
•
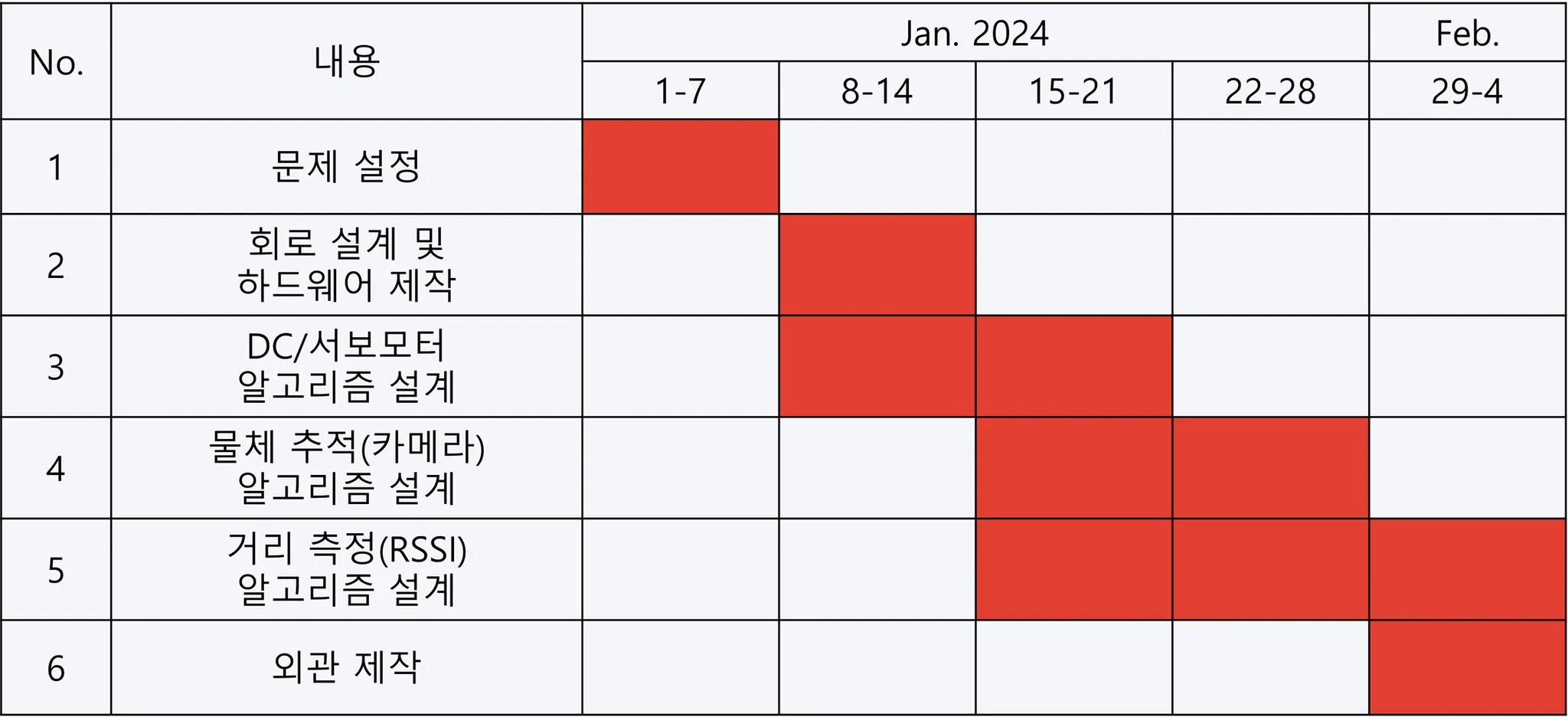
타임라인
•
Software
◦
Raspberry Pi 4
◦
BTS7060 모터드라이버
•
Hardware
◦
BleakScanner
◦
OpenCV(Python)
◦
RPI.GPIO, Pigpio
프로젝트 소감
•
전민경: 자율주행 구현이 생각보다 어려웠습니다. 카메라가 조명 밝기의 영향을 받고, 특히 블루투스 RSSI값이 관측하는 곳마다 세기가 달라져서 정규화시키기 까다로웠습니다. 그래도 팀원들과 함께 머리를 맞대어 저희만의 자율주행 자동차를 만들고, 핸즈크래프트 1등이라는 값진 결과를 얻어낼 수 있어서 너무나 뿌듯합니다!
